7.3. Hypothesis 3: Fast Adaptation, Extension, and Combination of Behaviors
To support our third hypothesis, we’ll show measured sessions where existing behaviors were adapted, composed, or extended rather than rebuilt from scratch.
In Figure 7.25, we summarize three measured adaptation sessions on Alex. Each row shows normalized active adaptation time on a log-second axis with internal milestone structure recovered from screen recordings. The bottle carry-through session composes existing pickup and door behaviors into one long-horizon task. The break-room session adapts a lab right-pull traversal to a real left-pull door: door-specific mirroring was only the starting transfer, and most time went to retuning opening, fallbacks, traversal, and footsteps. The two-table sorting session extends the open-house ball-return behavior with locomotion, table-specific routing, and color-dependent branches; its total includes an off-robot pre-authoring pass. Checkmarks mark first autonomous success.
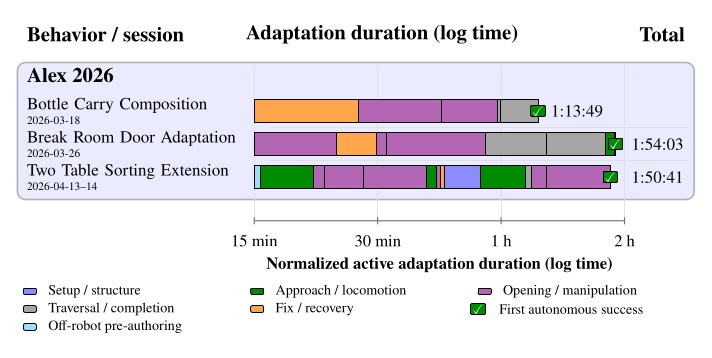
The subsections below walk through each row in Figure 7.25 with a representative still, the authoring-time table, and a link to the screen recording.
7.3.1. Bottle Carry Through Composition (Alex, 2026-03-18)
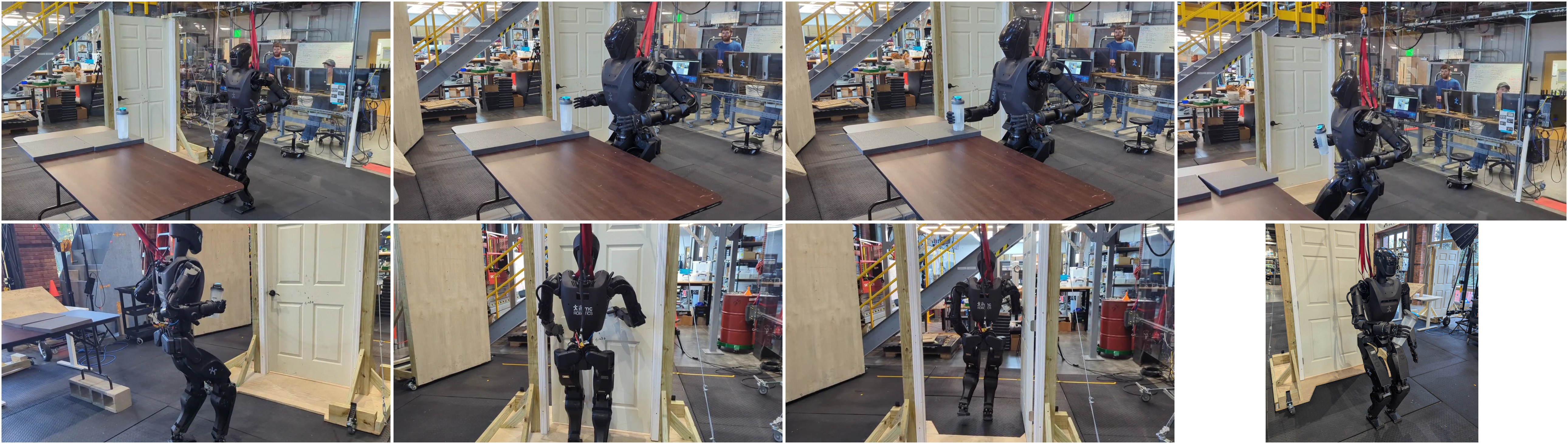
On March 18, 2026, we composed an existing bottle pickup behavior with the left push door traversal so Alex could carry a bottle through the door in one autonomous run. Most of the session wired the two behaviors together, recovered from a tooling failure while loading the door subtree, and tuned grasp and traversal so the bottle stayed in hand. First fully autonomous success came at 1 hour, 13 minutes, and 49 seconds of measured active adaptation time. The result is shown in Figure 7.26. Authoring times are presented in Table 7.22.
Most of the 1 hour 13 minute 49 second session went to wiring existing pickup and door subtrees and preserving the bottle grasp through traversal (Table 7.22). We did not author a new door behavior from scratch. This supports hypothesis 3 because the work edited connections and parameters between existing behaviors rather than rebuilding either subtree.
7.3.2. Break Room Door Adaptation (Alex, 2026-03-26)
On March 26, 2026, we adapted the lab right pull door traversal to the break room left pull door on Alex. Door mirroring was only the starting point. Most of the 1 hour, 54 minutes, and 3 seconds of measured active adaptation time went to retuning opening, fallbacks, traversal, and footsteps on the real door. The successful run is shown in Figure 7.27. Authoring times are presented in Table 7.23.

| Elapsed time | Adaptation milestone |
|---|---|
| 0:00:33 | Load DoorTraversal.json (mirrored left pull, untested on a real door). |
| 0:01:56 | Door type and door-relative poses identified from scene objects. |
| 0:23:51 | First real-door opening after retuning the lever-turn motion. |
| 0:29:44 | Point-check fallback added to retry door opening when the pull is unreliable. |
| 0:31:29 | Door fully opened. |
| 0:54:49 | Spine yaw added after the lever turn for consistent opening. |
| 1:17:13 | Traversal arm motions simplified under the no-spring-closer assumption. |
| 1:48:00 | Traversal footsteps re-authored; shoulder-frame clearance checked in Preview Mode. |
| 1:53:20 | Reset and run the behavior autonomously from the top. |
| 1:54:03 | First successful break-room door traversal. |
Table 7.23. Continuous authoring timeline for the March 26, 2026 break room door adaptation shown in Figure 7.27.
Our behavior mirroring function supplied the starting tree, but 1 hour 54 minutes 3 seconds went to retuning on the real left pull door (Table 7.23), which was more difficult to open and did not have a spring closer. Point check fallbacks, spine yaw, and re-authored footsteps were the main edits rather than a new behavior file. This supports hypothesis 3 because most of the effort went into localized changes inside an existing traversal behavior.
7.3.3. Two Table Sorting Extension (Alex, 2026-04-13 to 14)
From April 13 through 14, 2026, we extended the open house ball return behavior to sort colored balls between two tables with locomotion between stations. The measured total is 1 hour, 50 minutes, and 41 seconds, including 15 minutes and 30 seconds of off-robot pre-authoring before the real-robot follow-up session. The documented demonstration sorted nine of nine balls correctly, with three table approaches and two transitions between tables. A still from the task setup is shown in Figure 7.28. Authoring times are presented in Table 7.24.

The extended behavior reused demo/BallsInBins.json and added routing logic in 15 minutes 30 seconds off robot, followed by 1 hour 35 minutes on real robot (Table 7.24).
The documented execution run sorted 9/9 balls with walks between tables in 2 minutes 8 seconds (Table 7.12).
This supports hypothesis 3 because locomotion and ball color-based branches were added to an existing sorting behavior instead of authoring a new one from an empty tree.