7.1. Hypothesis 1: Fast Loco-Manipulation Behaviors
To support our first hypothesis, we’ll present the demonstrations that highlight the system’s capabilities and breadth while also executing with high speed relative to prior and comparative works. This section also includes demonstrations of repeated-run reliability and resilience to external disturbances when trying to traverse doors and pick and place objects.
7.1.1. Speed and Capability Evidence
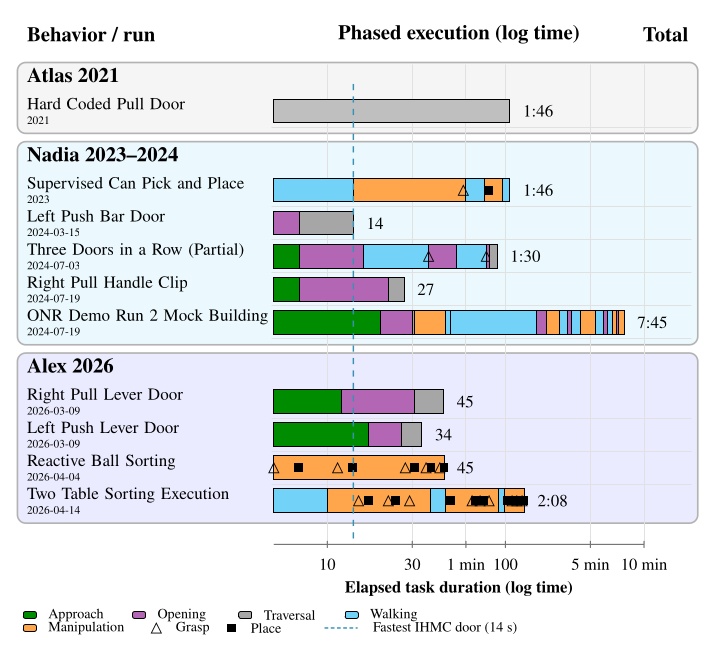
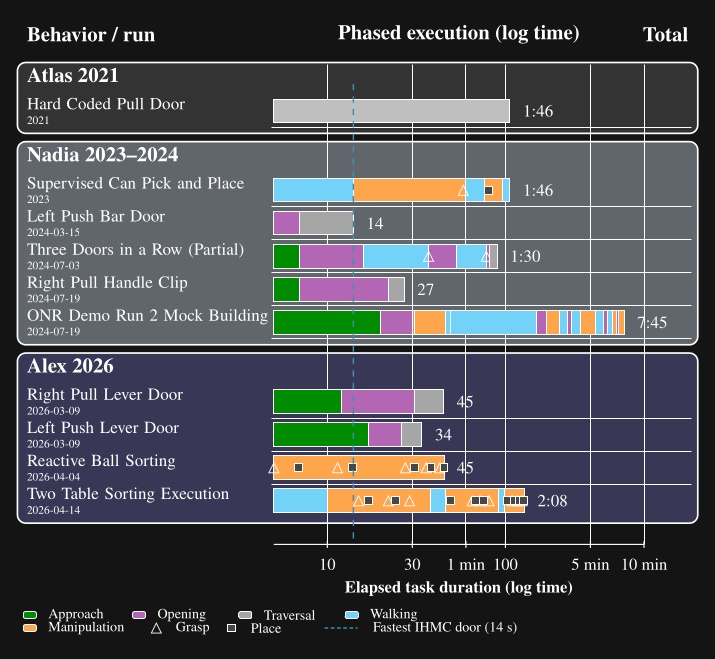
In Figure 7.1, we present a representative sample of our loco-manipulation behaviors. This figure shows that our door behaviors were very slow on Atlas, over a minute, when we had hard-coded behaviors. Door behaviors were drastically sped up on Nadia with runtime-editable structure and concurrent action layering. Later on Alex, we demonstrate new manipulation tasks and locomotion transitions in the same speed regime of seconds to minutes.
In the figure, the rows are color coded to show different phases of the behaviors. For door behaviors, it shows approach, opening, and traversal phases, and for loco-manipulation behaviors it shows walking and manipulation phases. Triangle and square markers indicate object grasps and placements. The dashed vertical line marks the fastest IHMC door traversal on record (14 s, Nadia 2024 left push-bar).
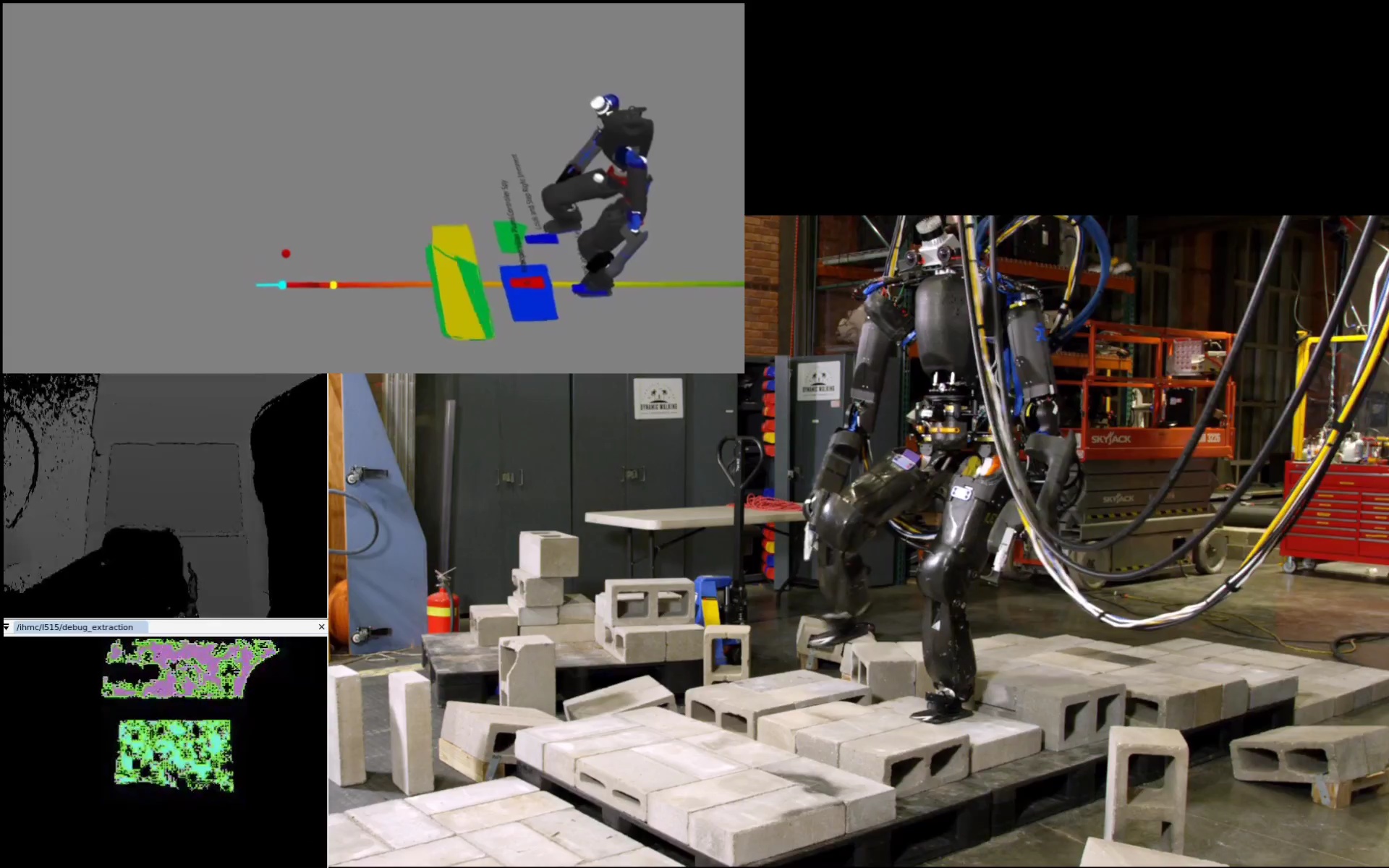
7.1.1.1. Look-and-Step Rough Terrain
An early speed result was in our perceptive locomotion work [71]. Figure 7.2 illustrates a 14-step key result, taking 14 autonomous steps in 37 seconds. The speed of this behavior compared to prior work in the literature and an estimated human baseline is presented in Table 7.1.
| System | Distance (m) | Avg. speed (m/s) | Relative speed |
|---|---|---|---|
| Fallon et al. [33] | 5.5 | 0.023 | 1.0x |
| Look-and-step [71] | 5.3 | 0.079 | 3.4x |
| Human baseline | - | 0.7 | 30x |
Table 7.1. Rough-terrain speed comparison used in the first speed pillar claim.
This 14 step run averaged 0.079 m/s over 5.3 m (Table 7.1), about 3.4 times faster than the Fallon et al. baseline at 0.023 m/s. This demonstration uses an earlier architecture than is tested in hypothesis 1. It is still useful context because it shows an early focus as part of this thesis in achieving faster robot locomotion and onboard sensing.
7.1.1.2. Atlas Hard-Coded Pull-Door Traversal
Our earliest in-house door-speed anchor is the hard-coded IHMC Atlas pull-door traversal from the June 2021 building exploration era, shown in Figure 7.3. That step-by-step behavior took 106 s from approach start to full traversal completion, with long pauses, fiducial dependence, and no robot-local authored recovery.
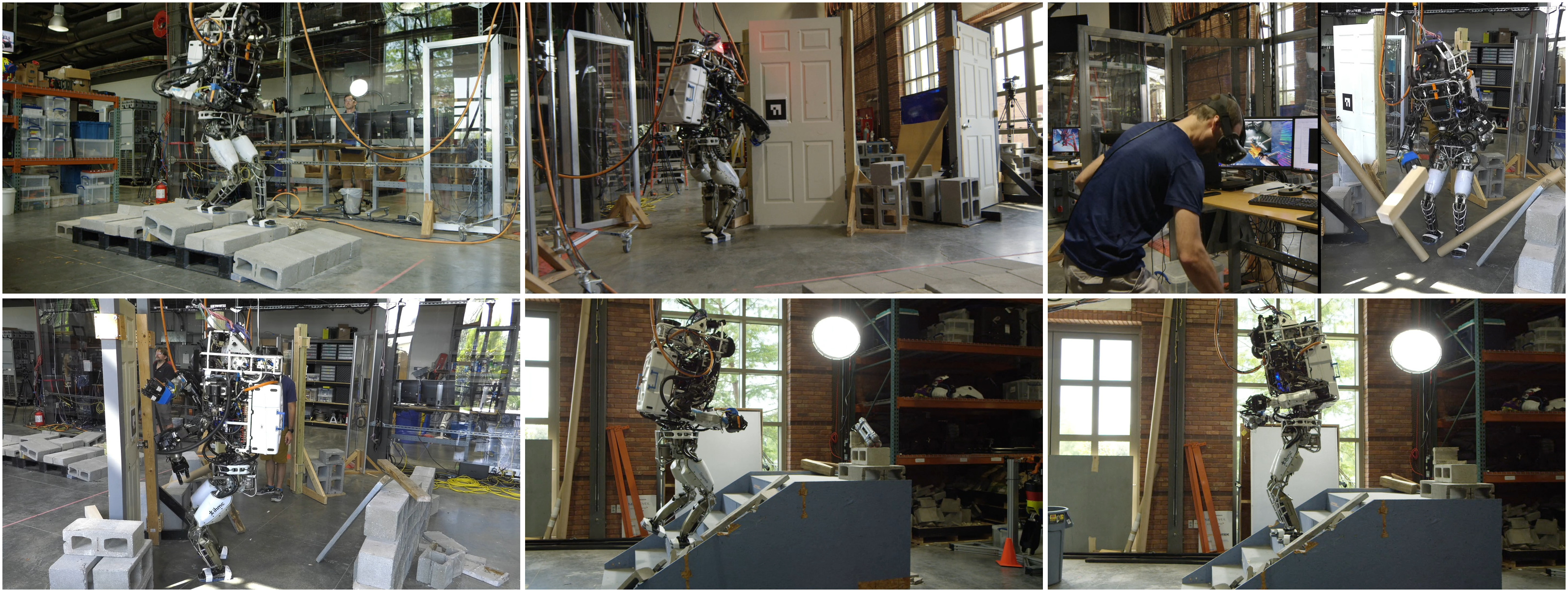
Compared with the July 2024 Nadia right pull handle traversal at 27 s (Table 7.5), this Atlas run is about 3.9 times slower on a pull side door task. The later run removed fiducial dependence, used runtime authored structure, and was run on a different platform. The comparison is not controlled, but still anchors how much faster our recent door behaviors became relative to this IHMC baseline.
7.1.1.3. Supervised Can Pick-and-Place
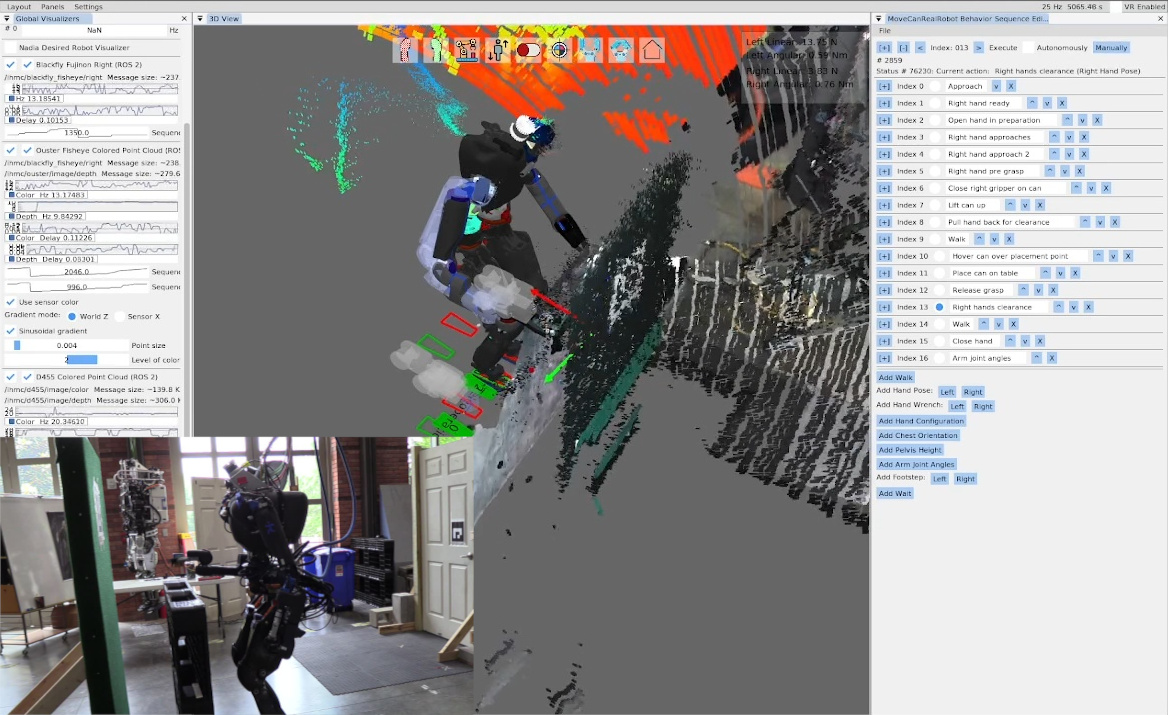
On June 20, 2023, we executed a supervised can-of-soup pick-and-place behavior on Nadia in 1 minute and 46 seconds, shown in Figure 7.4. The run was operator-supervised, used an ArUco marker rather than direct can detection, and required manual gripper retries between actions. Timestamps are presented in Table 7.2.
| Time | Action completed |
|---|---|
| 0:00 | Begin approach. |
| 0:11 | Approach table. |
| 0:14 | Right hand approaches can. |
| 0:53 | Pre-grasp hand pose. |
| 0:58 | Grasp can of soup. |
| 1:00 | Pull back hand with can of soup. |
| 1:16 | Step to the side. |
| 1:20 | Set down can. |
| 1:36 | Release grasp on can. |
| 1:46 | Back away from task. |
Table 7.2. Step-by-step supervised execution of picking and placing can of soup.
The 1 minute 46 second run shows an early manipulation capability on Nadia, but much of the timeline is operator supervised tuning rather than autonomous execution (Table 7.2). ArUco marker dependence and operator supervision make this demonstration an early speed reference rather than a testable result for hypothesis 1. It does show that the architecture could, albeit with great difficulty, execute pick and place on real hardware before YOLO based scene authoring was in place.
7.1.1.4. 14 s Nadia Left Push-Bar Traversal
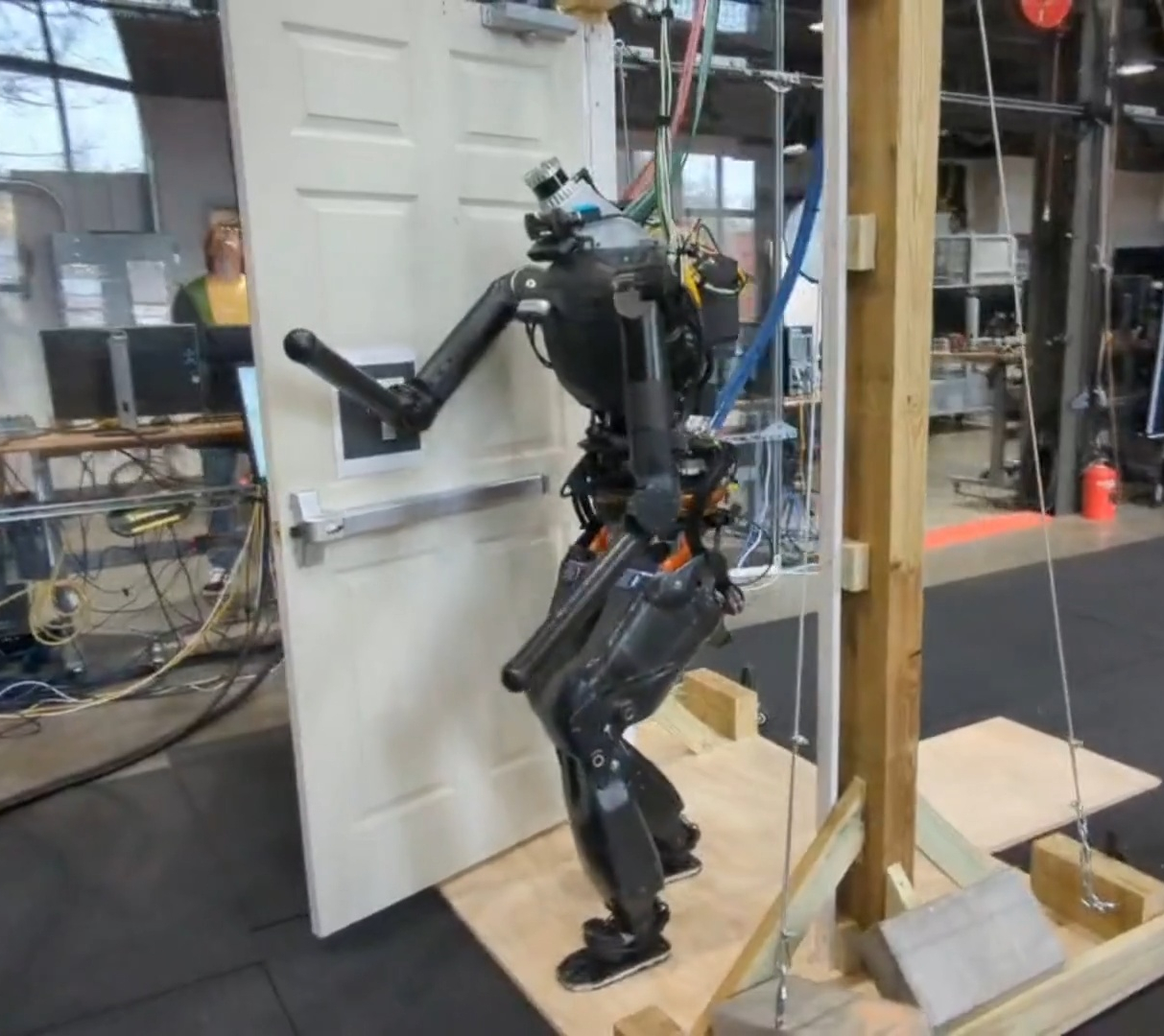
Our fastest door traversal ever was on March 15, 2024, and is presented in Figure 7.5. The robot walked continuously during this run, using concurrent arm actions to open the push bar door during the traversal. Timestamps are presented in Table 7.3.
| Time | Event |
|---|---|
| 0:00 | Approach begins. |
| 0:04 | Push bar is unlatched. |
| 0:07 | Shoulders square with the door frame. |
| 0:14 | Traversal is complete. |
Table 7.3. Event times for the March 15, 2024 Nadia left push-bar traversal shown in Figure 7.5.
The robot unlatched the push bar at 4 s and cleared the doorway at 14 s (Table 7.3). Continuous walking with concurrent arm actions produced our fastest door traversal on record and is marked by the dashed line in Figure 7.1. Relative to the 106 s Atlas anchor, this run is direct evidence that concurrent action layering removed long execution pauses.
7.1.1.5. Three Doors in a Row
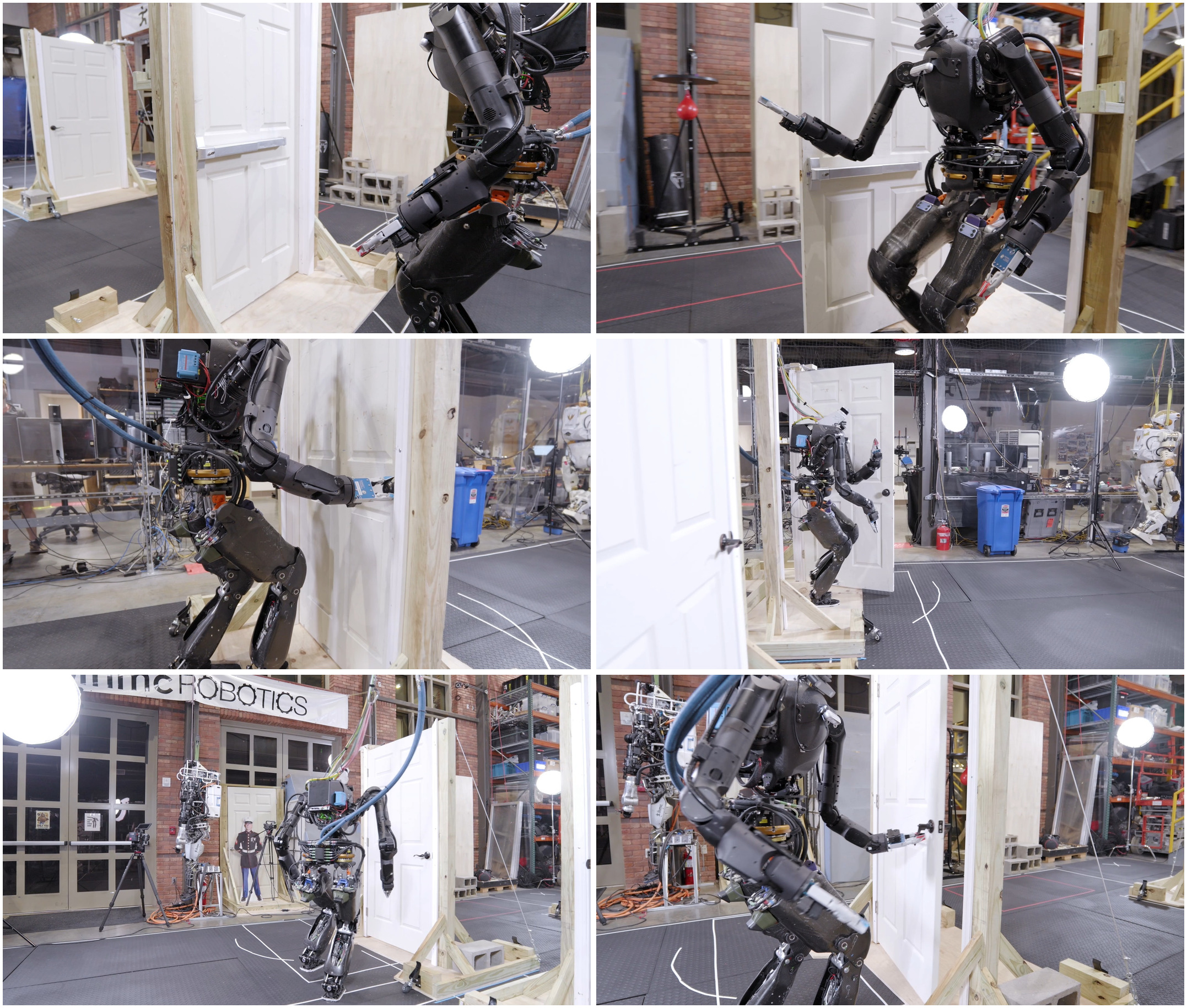
On July 3, 2024, we attempted to traverse three lab doors consecutively in one continuous run, shown in Figure 7.6. The robot cleared the first two doors but fell during traversal of the third; the timed run ended at 1 minute and 30 seconds. Timestamps are presented in Table 7.4.
| Time | Event |
|---|---|
| 0:02 | Start approaching door 1 (left push bar with spring closer). |
| 0:07 | Start pushing door 1 open. |
| 0:16 | Clear door 1; start approaching door 2. |
| 0:37 | Start grasping door 2 knob (right push knob door). |
| 0:42 | Open door 2. |
| 0:53 | Clear door 2; start approaching door 3. |
| 1:18 | Start grasping door 3 lever handle (right pull lever handle door). |
| 1:21 | Open door 3. |
| 1:30 | Fall during door 3 traversal. |
Table 7.4. Event times for the July 3, 2024 Nadia three-door run shown in Figure 7.6.
The robot cleared the first door at 16 s and the second at 53 s, then fell during the third traversal at 1 minute 30 s (Table 7.4). The run still supports capability breadth across push bar, push knob, and pull handle doors in one continuous behavior. The fall shows that full traversal reliability remained a weak point, which we talk about in the reliability results below.
7.1.1.6. Nadia Right Pull-Handle Traversal
On July 19, 2024, Nadia completed a representative right pull-handle door traversal with hook hands in 27 seconds, shown in Figure 7.7. Timestamps are presented in Table 7.5.

| Time | Event |
|---|---|
| 0:00 | Approach begins. |
| 0:07 | Door is opened. |
| 0:22 | Shoulders square with the door frame. |
| 0:27 | Traversal is complete. |
Table 7.5. Event times for the July 19, 2024 Nadia hook-hands right pull-handle traversal shown in Figure 7.7.
The 27 s total matches the pull lever traversal measurement in Figure 7.1. Door opening finished at 7 s, but panel clearance kept the robot from getting through the frame until 22 s (Table 7.5). Figure 7.13 shows the same push versus pull timing pattern across Nadia runs.
7.1.1.7. ONR Mock-Building Demo Run 2
On July 19, 2024, we executed the second timed full run of our ONR mock-building search demo in 7 minutes and 45 seconds, shown in Figure 7.8. This run searched three rooms, cleared a blocked doorway, moved furniture, and ended with a salute behavior. Timestamps are presented in Table 7.6.
| Time | Event |
|---|---|
| 0:00 | Robot starts from outside first room. |
| 0:20 | Starts pushing push-bar door. |
| 0:30 | Clears right push-bar door. |
| 0:31 | Starts room search; standing in place. |
| 0:46 | Finishes room search. |
| 0:49 | Begins approach to door 2 (right pull handle). |
| 2:30 | Starts pulling open door 2. |
| 2:49 | Clears walking through door 2. |
| 2:51 | Begins searching room 2; standing in place. |
| 3:21 | Search ended; object not found; leaving room. |
| 3:43 | Starts pushing door 2 (left push bar) open to go back through. |
| 3:54 | Cleared door 2; back in main room. |
| 4:24 | After walking to center of room; search again. |
| 5:20 | Clears recycling bin blocking door 3. |
| 5:55 | Starts pulling open door 3 (right pull door). |
| 6:13 | Clears door 3. |
| 6:37 | Searches room 3; object not found; turn around. |
| 7:00 | Starts pushing door 3 (left push bar) open to go back through. |
| 7:12 | Clears door 3. |
| 7:31 | Moves couch out of the way; finds object. |
| 7:45 | Salute behavior; end of demo. |
Table 7.6. Event times for the July 19, 2024 Nadia ONR mock-building demo run 2.
The 7 minute 45 second run combined three room searches, five door passages, furniture manipulation, and a blocked doorway recovery (Table 7.6). Much of the elapsed time went to searching and repositioning between doors, not to isolated door traversals. The standalone 27 s pull handle run from the same day (Table 7.5) shows that individual door phases could be fast, but this chained demo mainly demonstrates breadth across many authored behaviors in one tree.
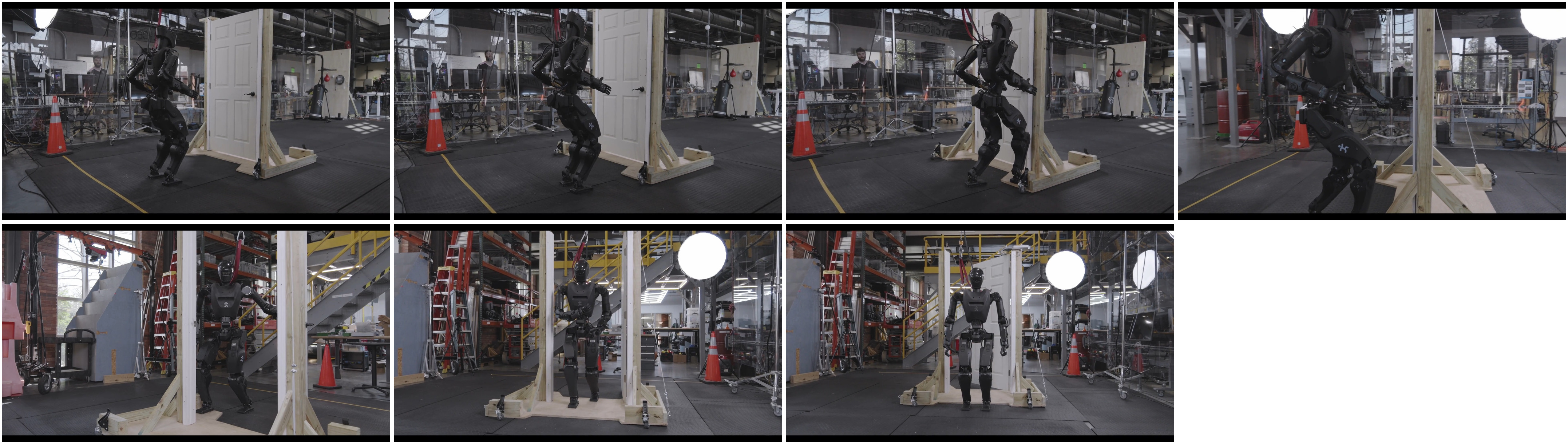
7.1.1.8. Alex Right Pull Lever Traversal
On March 9, 2026, Alex completed a right pull lever-handle door traversal in 45 seconds, shown in Figure 7.9. Timestamps are presented in Table 7.7.
| Time | Event |
|---|---|
| 0:02 | Coarse approach begins. |
| 0:09 | Fine approach begins. |
| 0:14 | Opening stance is achieved. |
| 0:18 | Door unlatching is completed. |
| 0:33 | Door opening is sufficient and traversal begins. |
| 0:42 | Shoulders align with the door frame. |
| 0:47 | Traversal is complete. |
Table 7.7. Timestamped events for the March 9, 2026 Alex right pull lever-handle traversal shown in Figure 7.9.
| Phase | Time window | Duration | Description |
|---|---|---|---|
| Approach | 0:02–0:14 | 12 s | Coarse approach from the distant start, followed by the fine approach into the authored opening stance. |
| Unlatch | 0:14–0:18 | 4 s | Final upper-body alignment, handle engagement, and latch release. |
| Panel motion | 0:18–0:33 | 15 s | Pull the panel clear while staying outside the door swing. |
| Traverse | 0:33–0:47 | 14 s | Commit through the frame, bring the shoulders into alignment by 0:42, and clear the doorway. |
Table 7.8. Per-phase timing breakdown for the March 9, 2026 Alex right pull lever-handle traversal.
This 45 s run breaks down into 12 s approach, 4 s unlatch, 15 s panel motion, and 14 s traverse (Table 7.8). Panel motion is the longest phase on pull doors because the robot must stay clear of the swing. This timing places Alex pull traversals in the same tens of seconds band as our 2024 Nadia results and well below the minute scale classical literature entries in Figure 7.29.
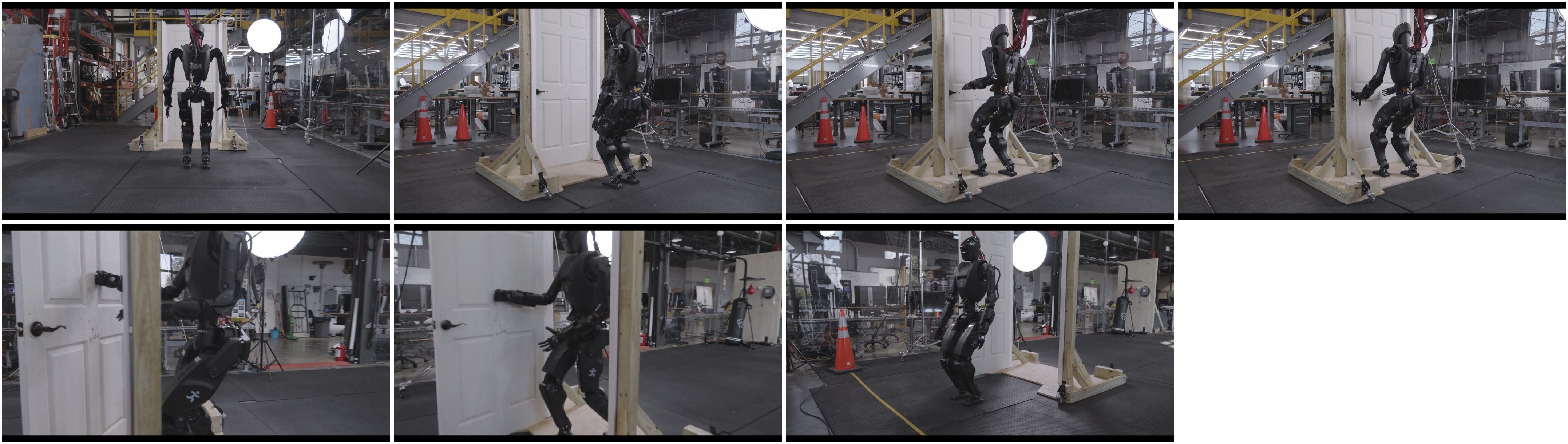
7.1.1.9. Alex Left Push Lever Traversal
On March 9, 2026, Alex completed a left push lever-handle door traversal in 34 seconds, shown in Figure 7.10. Timestamps are presented in Table 7.9.
| Time | Event |
|---|---|
| 0:03 | Coarse approach begins. |
| 0:12 | Fine approach begins. |
| 0:17 | Opening stance is achieved. |
| 0:20 | Door lever unlatching is completed. |
| 0:26 | Door opening is sufficient and traversal begins. |
| 0:27 | Shoulders align with the door frame. |
| 0:34 | Traversal is complete. |
Table 7.9. Timestamped events for the March 9, 2026 Alex left push lever-handle traversal shown in Figure 7.10.
| Phase | Time window | Duration | Description |
|---|---|---|---|
| Approach | 0:03–0:17 | 14 s | Coarse approach from the distant start, followed by the fine approach into the authored opening stance. |
| Unlatch | 0:17–0:20 | 3 s | Final upper-body alignment, lever engagement, and latch release. |
| Panel motion | 0:20–0:26 | 6 s | Push the panel clear while continuing to bias the body toward forward progress. |
| Traverse | 0:26–0:34 | 8 s | Commit through the frame, align the shoulders with the opening by 0:27, and clear the doorway. |
Table 7.10. Per-phase timing breakdown for the March 9, 2026 Alex left push lever-handle traversal.
The 34 s push side run is faster than the 45 s pull run on the same robot and week. Approach and panel motion together take only 20 s, and shoulders align with the frame just 1 s after traversal begins (Table 7.10). This matches the progress curve pattern in Figure 7.13, where push doors allow more continuous forward motion.
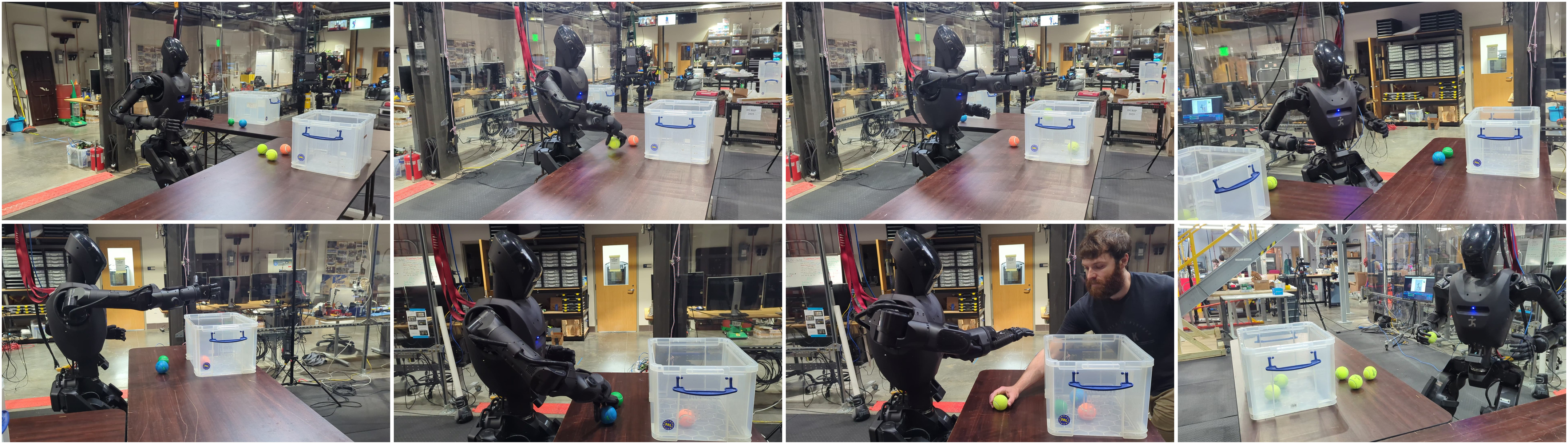
7.1.1.10. Reactive Single-Table Ball Sorting
On April 4, 2026, Alex completed a reactive single-table ball-sorting run in 45.2 seconds while humans continuously placed and sometimes removed balls on the table, shown in Figure 7.11. Timestamps are presented in Table 7.11.

| Time from start (s) | Event |
|---|---|
| 0.0 | Human places ball 1 (yellow) on the table. |
| 4.5 | Robot grasps ball 1. |
| 6.9 | Robot places ball 1 in container 1. |
| 7.2 | Human places ball 2 (yellow) on the table. |
| 11.4 | Robot grasps ball 2. |
| 13.9 | Robot places ball 2 in container 1. |
| 14.5 | Human places ball 3 (yellow) on the table. |
| 17.8 | Human removes ball 3 from the scene. |
| 20.6 | Robot identifies that the pick failed. |
| 21.9 | Human places ball 4 (blue) on the table. |
| 27.4 | Robot grasps ball 4. |
| 29.8 | Human places ball 5 (yellow) on the table. |
| 30.9 | Robot places ball 4 in container 2. |
| 32.2 | Human places ball 6 (yellow) on the table. |
| 35.8 | Robot grasps ball 5. |
| 38.2 | Robot places ball 5 in container 1. |
| 42.8 | Robot grasps ball 6. |
| 45.2 | Robot places ball 6 in container 1. |
Table 7.11. Timeline of the Alex reactive ball-sorting demonstration. Times are relative to the first human ball placement, which occurs at 1.2 s in the source video.
The 45.2 s run sorted six balls while humans continuously placed new balls on the table (Table 7.11). This rate of action supports hypothesis 1 on manipulation speed under a dynamic scene. Resilience to the ball removal disturbance at 17.8 s is analyzed in 1.2.6.
7.1.1.11. Two-Table Loco-Manipulation Sorting
On April 14, 2026, we extended the reactive ball-sorting behavior to a two-table loco-manipulation task, shown in Figure 7.12. In the timed execution run used in Figure 7.1, the robot sorted nine balls across two tables in 2 minutes and 8 seconds. Timestamps are presented in Table 7.12.
| Time | Event |
|---|---|
| 0:00 | Run begins; walk to table A. |
| 0:10 | Begin ball sorting at table A. |
| 0:15 | Grasp ball. |
| 0:17 | Place ball in container. |
| 0:22 | Grasp ball. |
| 0:24 | Place ball in container. |
| 0:29 | Grasp ball. |
| 0:38 | Walk to table B. |
| 0:46 | Begin ball sorting at table B. |
| 0:49 | Place ball carried from table A. |
| 1:05 | Grasp ball. |
| 1:08 | Place ball in container. |
| 1:12 | Grasp ball. |
| 1:15 | Place ball in container. |
| 1:21 | Grasp ball. |
| 1:31 | Walk to table A. |
| 1:39 | Begin ball sorting at table A. |
| 1:43 | Place ball in container. |
| 1:49 | Grasp ball. |
| 1:52 | Place ball in container. |
| 1:56 | Grasp ball. |
| 2:00 | Place ball in container. |
| 2:04 | Grasp ball. |
| 2:06 | Place ball in container. |
| 2:08 | Run complete. |
Table 7.12. Event times for the April 14, 2026 Alex two-table loco-manipulation sorting run shown in Figure 7.12.
Nine balls were sorted between two tables in 2 minutes 8 seconds, with locomotion between tables at 0:00, 0:38, and 1:31 (Table 7.12). This demonstration shows a loco-manipulation capability beyond door traversal and exploration tasks. The timed run appears in Figure 7.1; the behavior extension that produced it is analyzed under hypothesis 3.
7.1.1.12. Nadia Door-Traversal Progress Curves
Figure 7.13 illustrates representative forward progress curves for door traversals on Nadia, showing the difference between push and pull doors. Pull doors can take longer because the robot must stay clear of the panel as it opens.
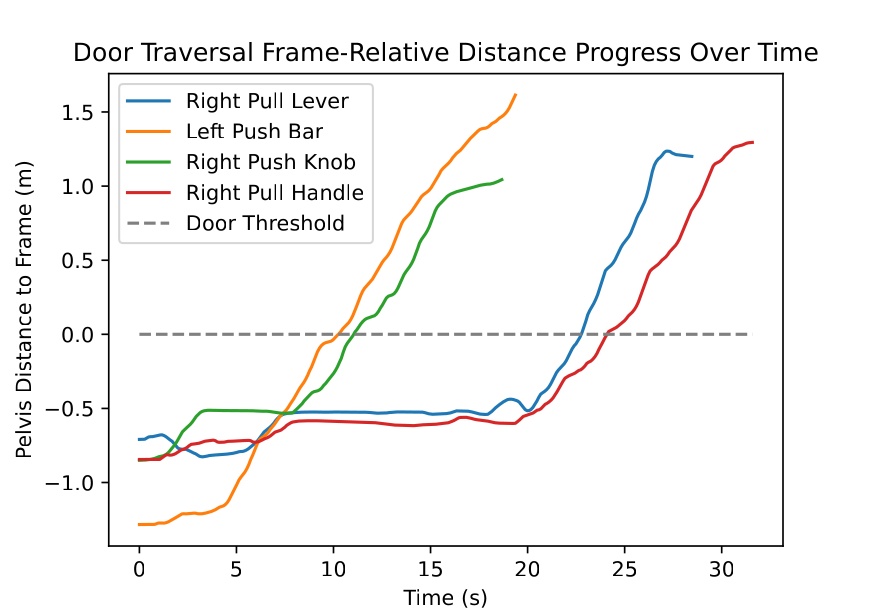
The four Nadia curves separate push doors, which keep moving forward, from pull doors, which stall progress while the panel opens. The 14 s push bar and 27 s pull handle runs above match these two curve shapes. The Alex push and pull traversals above follow the same qualitative pattern at 34 s and 45 s, even though they are not plotted in this figure.
Figure 7.1 summarizes the speed arc from the 106 s Atlas anchor through 14 to 45 s door traversals and minute scale manipulation tasks. The individual runs above supply the timed events behind each bar. Together they support the speed and capability parts of hypothesis 1.
7.1.2. Reliability and Resilience Evidence
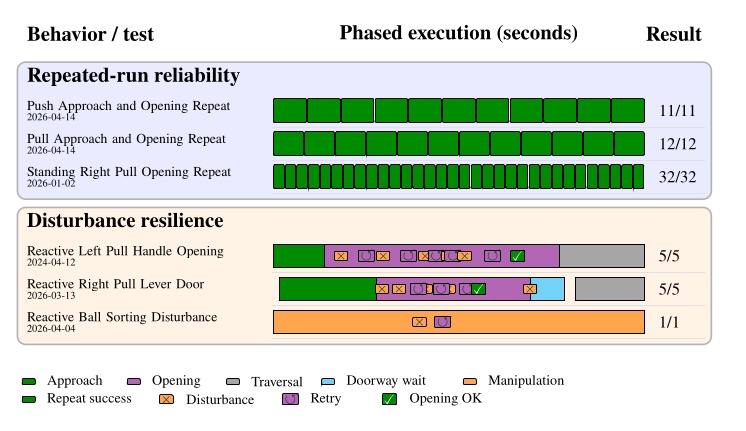
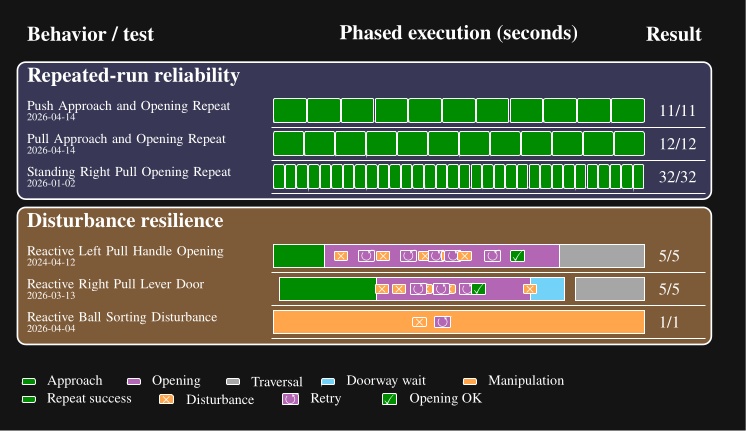
In Figure 7.14, we summarize our main in-house reliability and resilience anchors. The top band shows consecutive successful trials for repeated door approach and opening on Alex and Unitree H1-2. The bottom band shows disturbed runs where the robot retried and recovered. Photos and event tables for each run follow in the subsections below.
7.1.2.13. Alex Left Push Approach and Opening Repeat
On April 14, 2026, we ran the left push door behavior on Alex with a goal of at least 10 approach and opening trials. We lost count during the session and kept going so we would not stop short. The test ended with 11 successes in a row. All trials used the same lab left push door on the same night. An operator was present at the UI. We did not run the test to failure. Each run completed the approach and opening phases without failure. We did not repeat full doorway traversal in this test. The test is shown in Figure 7.15. Trial outcomes are presented in Table 7.13.
| Run | Outcome | Phase completed |
|---|---|---|
| 1 | Success | Approach and opening |
| 2 | Success | Approach and opening |
| 3 | Success | Approach and opening |
| 4 | Success | Approach and opening |
| 5 | Success | Approach and opening |
| 6 | Success | Approach and opening |
| 7 | Success | Approach and opening |
| 8 | Success | Approach and opening |
| 9 | Success | Approach and opening |
| 10 | Success | Approach and opening |
| 11 | Success | Approach and opening |
Table 7.13. Trial outcomes for the April 14, 2026 Alex left push approach and opening reliability test shown in Figure 7.15.
Eleven consecutive approach and opening trials completed without failure (Table 7.13). We did not test full traversal because the walking controller was not working well for traversal at the time of these experiments. However, our repeated trials still demonstrate reliable approach and opening. This 11/11 result is the Alex left push row in Figure 7.14.
7.1.2.14. Alex Right Pull Approach and Opening Repeat
On April 14, 2026, we ran the right pull door behavior on Alex with a goal of at least 10 approach and opening trials. We lost count during the session and kept going so we would not stop short. The test ended with 12 successes in a row. All trials used the same lab right pull door on the same night as the repeated push test. An operator was present at the UI. We did not run the test to failure. Each run completed the approach and opening phases without failure. We did not repeat full doorway traversal in this test. The test is shown in Figure 7.16. Trial outcomes are presented in Table 7.14.
| Run | Outcome | Phase completed |
|---|---|---|
| 1 | Success | Approach and opening |
| 2 | Success | Approach and opening |
| 3 | Success | Approach and opening |
| 4 | Success | Approach and opening |
| 5 | Success | Approach and opening |
| 6 | Success | Approach and opening |
| 7 | Success | Approach and opening |
| 8 | Success | Approach and opening |
| 9 | Success | Approach and opening |
| 10 | Success | Approach and opening |
| 11 | Success | Approach and opening |
| 12 | Success | Approach and opening |
Table 7.14. Trial outcomes for the April 14, 2026 Alex right pull approach and opening reliability test shown in Figure 7.16.
Twelve consecutive approach and opening trials completed without failure on the same night as the repeated push test (Table 7.14). Again, the scope was approach and opening only. This 12/12 result is the Alex right pull row in Figure 7.14.
7.1.2.15. Unitree H1-2 Standing Right Pull Opening Repeat
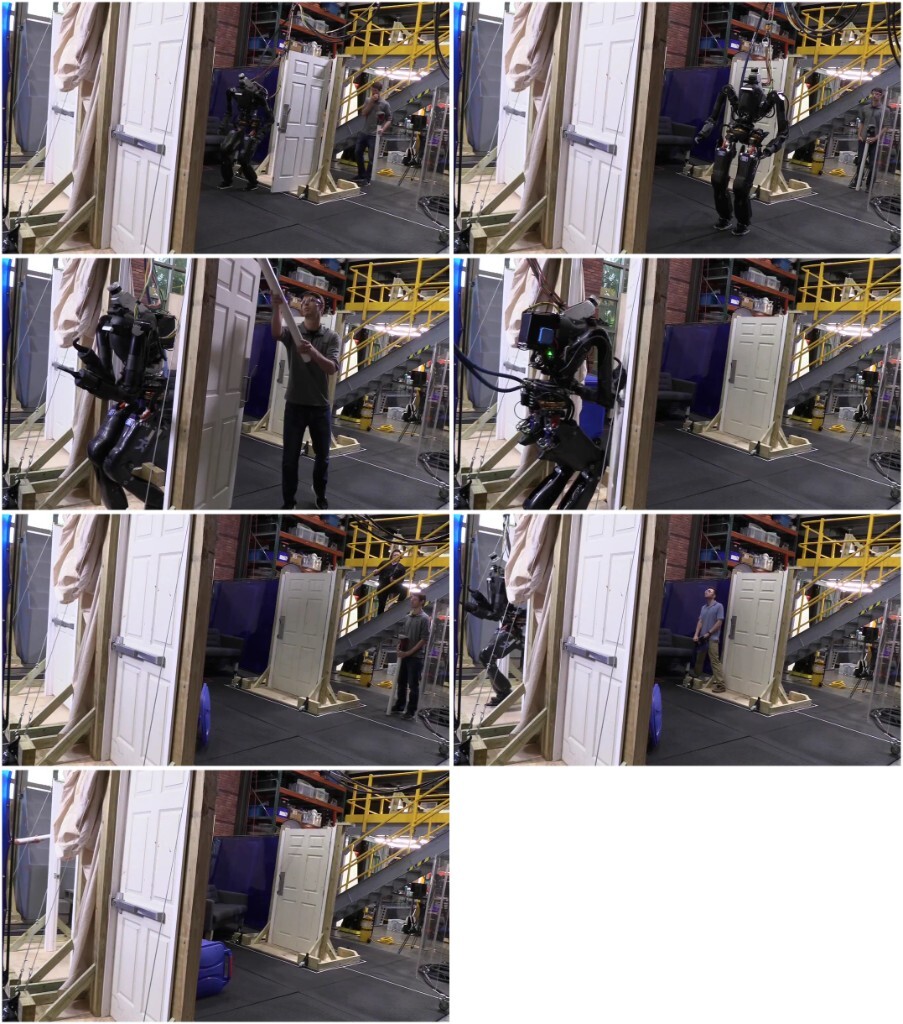
On January 2, 2026, we ran the standing right pull lever opening behavior 32 times in a row on Unitree H1-2. All trials used the same lab right pull door during the same session. An operator was present at the UI. We stopped after 32 successes; we did not run the test to failure. The robot opened the door from a standing start each time. The full test took about five minutes. The test is shown in Figure 7.17. The test protocol is presented in Table 7.15.

| Item | Description |
|---|---|
| Start condition | Standing at the door with the opening loop behavior loaded |
| Same door | One lab right pull lever door for all 32 trials |
| Operator | Present at the UI throughout the session |
| Test scope | Opening only; no approach or doorway traversal |
| Stop rule | Stopped after 32 successes; not run to failure |
| Loop structure | Goto action returns to the start of the opening sequence after each success |
| Measured result | 32/32 successful openings |
| Elapsed time | About five minutes |
Table 7.15. Protocol summary for the January 2, 2026 Unitree H1-2 standing right pull opening repeat test shown in Figure 7.17.
The robot opened the same lab door 32 times in a row from a standing start in about five minutes (Table 7.15). This repeated trial was autonomous even between repetitions: the goto loop returned to the same opening sequence after each success. It also serves as evidence that our system’s reliability extends beyond a single humanoid robot platform. The 32/32 result is the Unitree row in Figure 7.14.
7.1.2.16. Nadia Reactive Left Pull Handle Opening
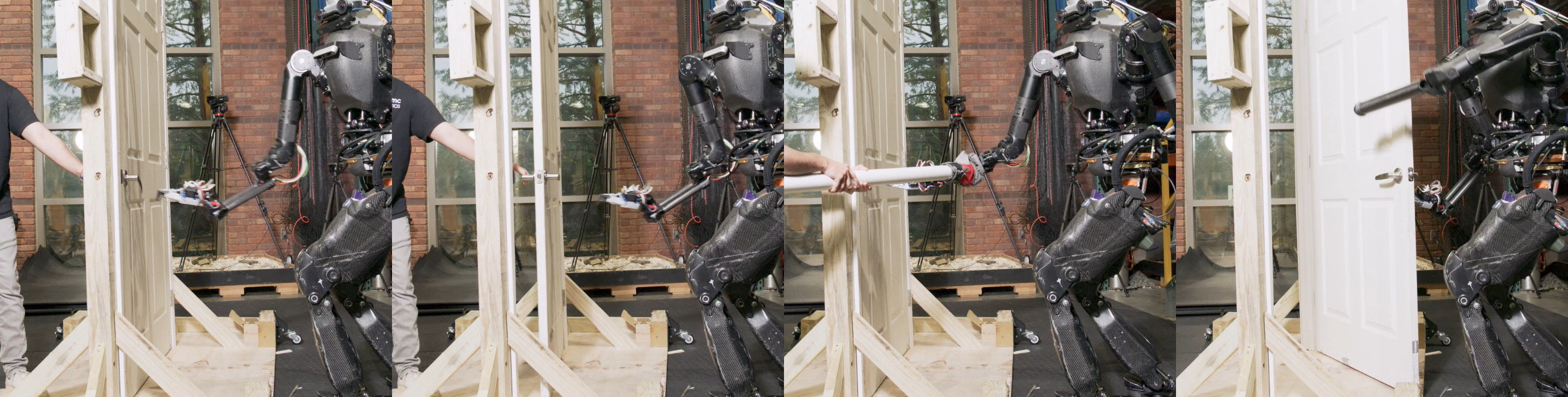
On April 12, 2024, we disturbed a Nadia left pull door opening five times during one run. The hard coded door traversal node detected each failure and retried until the door opened. The robot finished the full traversal without operator intervention. The run is shown in Figure 7.18. Timestamps are presented in Table 7.16.
| Time | Event |
|---|---|
| 0:00 | Robot begins approach to left pull door. |
| 0:06 | Robot begins to grasp and turn door handle. |
| 0:08 | Human holds door closed; robot gripper slips off handle (disturbance 1). |
| 0:11 | Robot attempts 2nd grasp and turn of handle. |
| 0:13 | Human allows partial opening, then pulls door back; robot hand slips off again (disturbance 2). |
| 0:16 | With door closed again, robot attempts 3rd grasp and turn. |
| 0:18 | Human allows partial opening, pulls back; grasp slips off again (disturbance 3). |
| 0:20 | Human pushes robot arm back during 4th reach attempt, preventing grasp (disturbance 4). |
| 0:22 | Robot arm pushed during reach for 5th grasp attempt in the same way (disturbance 5). |
| 0:26 | Robot begins 6th grasp attempt. |
| 0:29 | Robot is allowed to successfully open the door. |
| 0:34 | Robot completes opening the door; begins traversal steps. |
| 0:39 | Robot shoulders even with door frame. |
| 0:44 | Robot fully clears doorway. |
Table 7.16. Event times for the April 12, 2024 Nadia reactive left pull handle opening shown in Figure 7.18.
Five human disturbances during opening caused grasp slips or blocked reaches (Table 7.16). A hard coded traversal node retried until the door opened at 29 s and the robot cleared the doorway at 44 s without operator intervention. This is an earlier resilience mechanism than the authored fallback trees used in later Alex behaviors, but it still produced the Nadia reactive pull row in Figure 7.14.
7.1.2.17. Alex Reactive Right Pull Lever Door
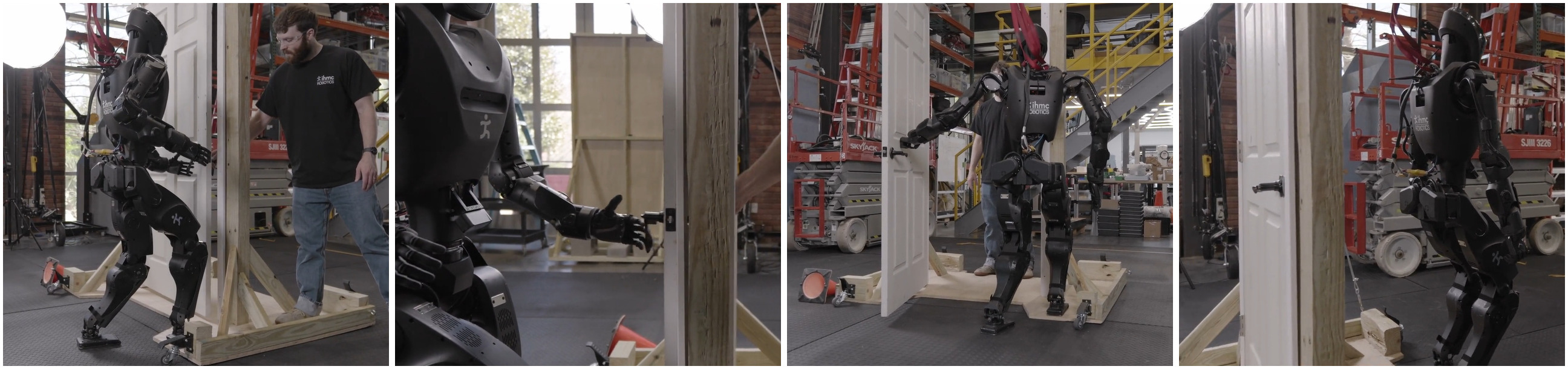
On March 13, 2026, we disturbed an Alex right pull lever door opening four times during the opening phase. A human also blocked the doorway before traversal. The behavior retried the opening and waited until the doorway was clear. The run is shown in Figure 7.19. Timestamps are presented in Table 7.17.
| Time | Event |
|---|---|
| 0:01 | Robot begins coarse door approach. |
| 0:10 | Robot begins fine door approach. |
| 0:18 | Robot begins 1st grasp and turn lever handle attempt. |
| 0:19 | Door partially opens; human pulls door back shut; robot grasp slips (disturbance 1). |
| 0:22 | Robot begins 2nd grasp attempt; human holds door shut; robot grasp slips (disturbance 2). |
| 0:26 | Robot begins 3rd grasp attempt; human allows partial opening again; robot grasp slips (disturbance 3). |
| 0:30 | Robot begins 4th grasp attempt; human pulls door back again; robot grasp slips (disturbance 4). |
| 0:34 | Robot begins 5th grasp attempt. |
| 0:36 | Robot is allowed to open the door. |
| 0:45 | Robot completes opening door all the way; human is now blocking doorway. |
| 0:51 | Human moves out of doorway. |
| 0:53 | Robot begins door traversal steps. |
| 1:01 | Robot shoulders even with door frame. |
| 1:05 | Robot fully clears doorway. |
Table 7.17. Event times for the March 13, 2026 Alex reactive right pull lever door run shown in Figure 7.19.
Four disturbances during opening and a blocked doorway before traversal triggered retries and a wait for clearance (Table 7.17). The run finished in 65 s overall. Unlike the 2024 Nadia case, the retry and wait logic here was authored in the behavior tree with fallback and condition nodes, and it appears as the Alex reactive pull row in Figure 7.14.
7.1.2.18. Reactive Single Table Ball Sorting Disturbance
For the previously presented 45.2 s sorting run in 1.1.10, the ball removal at 17.8 s is the main resilience event. The reactive tree logic abandoned the stale pick at 20.6 s and still placed all six balls by 45.2 s. That recovery is the ball sorting row in Figure 7.14.
The repeated run and disturbance results above support reliability and resilience within hypothesis 1. We do not have comparable repeat trial data for prior IHMC door baselines. Our tests also stopped short of repeated full door traversals because walk through performance was not yet trustworthy enough to risk the hardware.
References cited on this page
[33] M. F. Fallon et al., “Continuous humanoid locomotion over uneven terrain using stereo fusion,” in 2015 IEEE-RAS 15th international conference on humanoid robots (humanoids), 2015, pp. 881–888.
[71] D. Calvert, B. Mishra, S. McCrory, S. Bertrand, R. Griffin, and J. Pratt, “A fast, autonomous, bipedal walking behavior over rapid regions,” in 2022 IEEE-RAS 21st international conference on humanoid robots (humanoids), 2022, pp. 24–31. doi: 10.1109/Humanoids53995.2022.10000120.