3. Related Work
3.0.1. Introduction
In this chapter we’ll cover literature that relates to this dissertation on reusable action structure, reactive task coordination, human-machine coordination, perception, and real robot door task demonstrations. Architectural references include CLARAty [18], Affordance Templates [20], [22], Affordance Primitives [13], [14], Coactive Design [34], Director [15], FlexBE [16], RAFCON [17], Drawing Board [19], and the CENTAURO behavior tree systems [62], [63]. Door task references span from classical and model-based mobile-manipulator and humanoid systems to recent learned legged and humanoid policies. The systems with metrics that overlap our benchmark are compared with each other and this thesis in Evaluation.
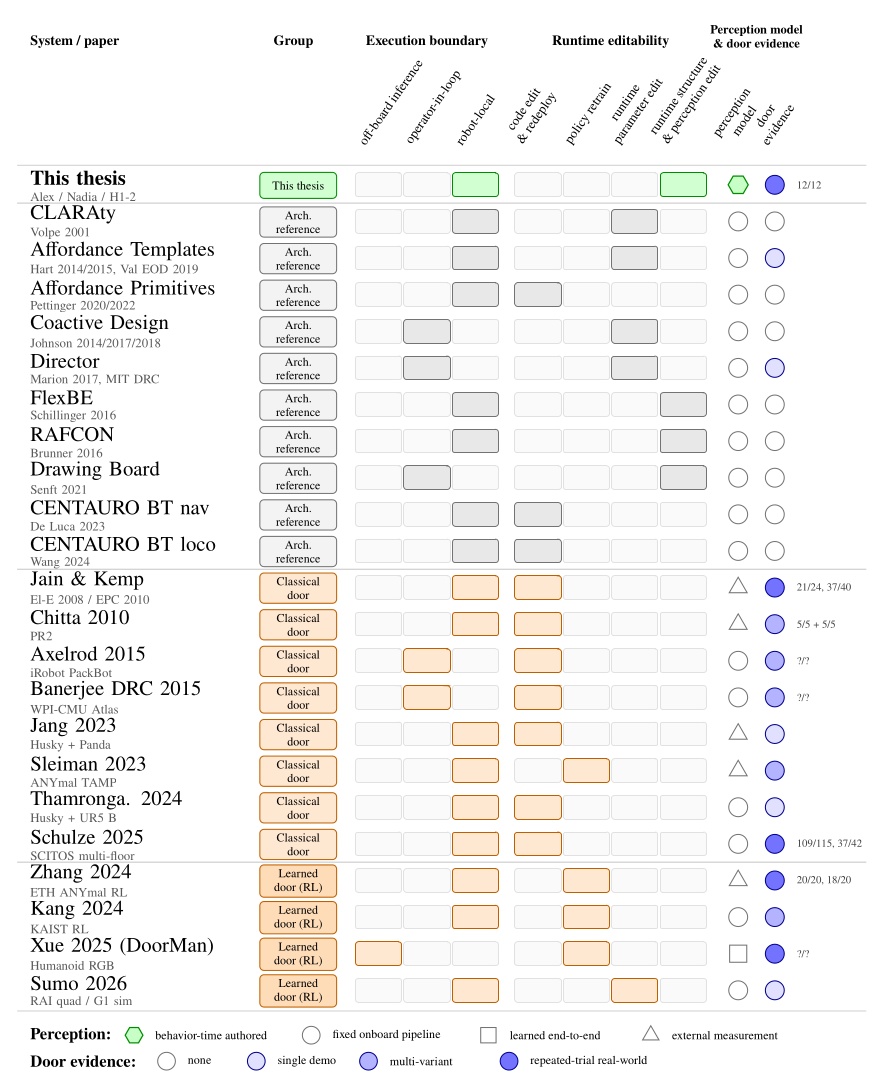
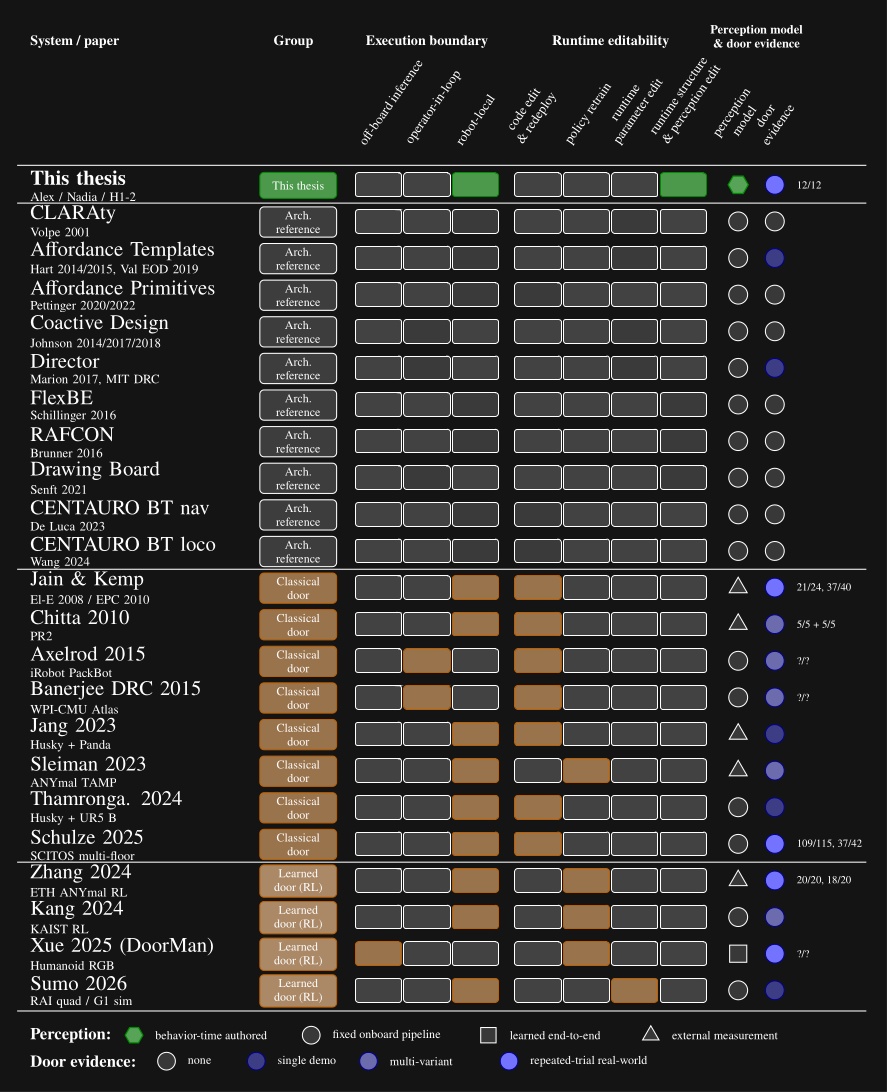
Figure 3.1 maps every system reviewed in this chapter across four dimensions: execution boundary, runtime editability, perception model, and door evidence. The execution boundary refers to where the process that controls the robot runs. It can be off-board, operator-in-the-loop, or purely on-board/robot-local. This is one part of qualifying our “Independence from External Systems” characteristic in Desirable Characteristics.
In Figure 3.1, each row is one system. The filled cells place that row on the execution-boundary axis (left band) and the runtime-editability axis (right band). The two rightmost columns encode the perception model used at task time, distinguishing behavior-time authored perception from a fixed onboard pipeline, learned end-to-end perception, and reliance on external measurement, alongside the strength of the system’s door-task evidence on a four-level scale from none to repeated-trial real-world. This thesis is the only row that combines robot-local execution, runtime structural and perception edits, behavior-time authored perception, and repeated-trial real-world door evidence. DoorMan is the only off-board entry, and the learned door systems concentrate on the policy-retrain column rather than runtime structural edits.
References cited on this page
[13] A. Pettinger, C. Elliott, P. Fan, and M. Pryor, “Reducing the teleoperator’s cognitive burden for complex contact tasks using affordance primitives,” in 2020 IEEE/RSJ international conference on intelligent robots and systems (IROS), 2020, pp. 11513–11518. doi: 10.1109/IROS45743.2020.9341576.
[14] A. Pettinger, F. Alambeigi, and M. Pryor, “A versatile affordance modeling framework using screw primitives to increase autonomy during manipulation contact tasks,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7224–7231, 2022, doi: 10.1109/LRA.2022.3181732.
[15] P. Marion et al., “Director: A user interface designed for robot operation with shared autonomy,” Journal of Field Robotics, vol. 34, no. 2, pp. 262–280, 2017.
[16] P. Schillinger, S. Kohlbrecher, and O. von Stryk, “Human-robot collaborative high-level control with application to rescue robotics,” in 2016 IEEE international conference on robotics and automation (ICRA), 2016, pp. 3898–3905. doi: 10.1109/ICRA.2016.7487584.
[17] S. G. Brunner, F. Steinmetz, R. Belder, and A. Dömel, “RAFCON: A graphical tool for engineering complex, robotic tasks,” in 2016 IEEE/RSJ international conference on intelligent robots and systems (IROS), 2016.
[18] R. Volpe, I. Nesnas, T. Estlin, D. Mutz, R. Petras, and H. Das, “The CLARAty architecture for robotic autonomy,” in 2001 IEEE aerospace conference proceedings (cat. no.01TH8542), 2001, pp. 1/121–1/132. doi: 10.1109/AERO.2001.931701.
[19] E. Senft et al., “Task-level authoring for remote robot teleoperation,” Frontiers in Robotics and AI, vol. 8, p. 707149, 2021, doi: 10.3389/frobt.2021.707149.
[20] S. Hart, P. Dinh, and K. A. Hambuchen, “Affordance templates for shared robot control,” in AAAI fall symposium on artificial intelligence and human-robot interaction, Arlington, VA, USA: AAAI, Nov. 2014. Available: https://ntrs.nasa.gov/citations/20140012413
[22] S. Hart, P. Dinh, and K. A. Hambuchen, “The affordance template ROS package for robot task programming,” in Proceedings of the IEEE international conference on robotics and automation (ICRA), 2015, pp. 6227–6234. doi: 10.1109/ICRA.2015.7140073.
[34] M. Johnson, J. M. Bradshaw, P. J. Feltovich, C. M. Jonker, M. B. van Riemsdijk, and M. Sierhuis, “Coactive design: Designing support for interdependence in joint activity,” J. Hum.-Robot Interact., vol. 3, no. 1, pp. 43–69, Feb. 2014.
[62] A. De Luca, L. Muratore, and N. G. Tsagarakis, “Autonomous navigation with online replanning and recovery behaviors for wheeled-legged robots using behavior trees,” IEEE Robotics and Automation Letters, vol. 8, no. 10, pp. 6803–6810, 2023, doi: 10.1109/LRA.2023.3313052.
[63] J. Wang, A. Laurenzi, and N. Tsagarakis, “Autonomous behavior planning for humanoid loco-manipulation through grounded language model.” 2024. Available: https://arxiv.org/abs/2408.08282